Contrôle De L'esprit Humain De La Locomotion Continue De Rat Cyborg Avec Interface Sans Fil De Cerveau À Cerveau
Scientific Reports volume 9 , Numéro d'article: 1321 ( 2019 )
Abstrait
Les interfaces cerveau-machine (BMI) constituent un canal d’information
prometteur entre le cerveau biologique et les dispositifs externes et
sont utilisées dans la construction d’un contrôle cerveau-dispositif.
Des études antérieures ont exploré la faisabilité d'établir une
interface cerveau-cerveau (BBI) à travers divers cerveaux via la
combinaison d'IMC.
Cependant, l'utilisation de BBI pour réaliser le contrôle multidegree
efficace d'un être vivant, tel qu'un rat, afin de mener à bien une tâche
de navigation dans un environnement complexe reste à démontrer.
Dans cette étude, nous avons développé une BBI du cerveau humain à un
rat implanté avec des microélectrodes (c-à-d. Cyborg de rat), qui
intégrait l'imagerie motrice et la stimulation cérébrale basées sur
l'électroencéphalogramme pour permettre à l'esprit humain de contrôler
la locomotion continue du rat.
Les instructions de contrôle ont été transférées à partir des résultats
de décodage d'imagerie motrice continue avec les modèles de contrôle
proposés et ont été envoyées sans fil au cyborg de rat par stimulation
micro-électrique du cerveau.
Les résultats ont montré que l'esprit humain pouvait naviguer en
douceur et en douceur dans les cyborgs de rat afin de mener à bien une
tâche de navigation dans un labyrinthe complexe.
Nos expériences ont indiqué que la coopération via la transmission
d'informations multidimensionnelles entre deux cerveaux par BBI assisté
par ordinateur est prometteuse.
introduction
La communication directe entre les cerveaux est depuis longtemps un
rêve pour les gens, en particulier pour ceux qui ont des difficultés de
langage verbal ou physique.
Les interfaces cerveau-machine (BMI) constituent un canal d’information
prometteur entre le cerveau et les dispositifs externes.
En tant que technologie de lecture potentielle de l’esprit humain, de
nombreuses études sur l’IMC ont déjà décodé l’activité cérébrale pour
contrôler les objets virtuels 1 , 2 , 3 ou les dispositifs réels 4 , 5 .
D'autre part, les IMC peuvent également être établis dans une direction
inverse du flux d'informations, les informations générées par
ordinateur pouvant être utilisées pour moduler la fonction d'une région
spécifique du cerveau 6 , 7 , 8 ou importer des informations tactiles dans le cerveau 9 , 10 , 11 .
La combinaison de différents types de systèmes d’IMC peut donc aider à
réaliser un échange direct d’informations entre deux cerveaux pour
former une nouvelle interface cerveau-cerveau (BBI). Cependant, très peu d'études antérieures ont exploré les BBI dans différents cerveaux 12 . Miguel Pais-Vieira et al .
établi un BBI pour réaliser le transfert en temps réel d'informations
sensorimotrices significatives sur le plan comportemental entre le
cerveau de deux rats 13 .
Tandis qu'un rat codeur accomplissait une tâche sensorimotrice, des
échantillons de son activité corticale étaient transmis aux aires
corticales correspondantes d'un rat «décodeur» en utilisant une
stimulation micro-électrique intracorticale (ICMS) sur son cortex
somatosensoriel.
Guidé uniquement par les informations fournies par le cerveau du rat
codeur, le rat décodeur a appris à faire des sélections comportementales
similaires. Des BBI entre humains ont également été explorés au préalable.
Un exemple d'interaction BBI entre humains a détecté une intention
motrice avec des signaux EEG enregistrés d'un volontaire et a transmis
cette information par Internet à la région du cortex moteur d'un autre
volontaire par stimulation magnétique transcrânienne, ce qui a entraîné
la transmission directe d'informations d'un cerveau humain à un autre.
utilisant des moyens non invasifs 14 .
Outre le transfert d'informations entre deux cerveaux d'un même type
d'organisme, le BBI permet de transférer des informations d'un cerveau
humain vers le cerveau d'un autre organisme. Yoo et al .
a utilisé un IMC basé sur le potentiel évoqué visuel à l'état
d'équilibre (SSVEP) pour extraire l'intention humaine et l'a transmise à
un rat anesthésié par stimulation ultrasonique transcrânienne sur son
cerveau, contrôlant ainsi le mouvement de la queue du rat anesthésié par
le cerveau humain 15 .
Dans un travail très récent, une BBI a été développée pour mettre en
œuvre le contrôle du mouvement d'une blatte cyborg en combinant un BVE
SSVEP humain et une stimulation nerveuse électrique sur les antennes de
la blatte 16 . Le cerveau humain pourrait alors diriger la blatte cyborg pour compléter la marche sur une piste en forme de S.
Bien que la faisabilité des BBI ait été préalablement prouvée, il reste difficile de créer une BBI efficace pour le contrôle multiniveau de la locomotion continue d'un mammifère dans un environnement complexe. Dans la présente étude, nous présentons une interface sans fil cerveau à cerveau, par laquelle un humain peut contrôler l'esprit de la locomotion continue d'un rat vivant. A la différence du contrôle d'appareils sans vie, il est essentiel de disposer d'une instantanéité extrêmement exigeante pour contrôler un être vivant en temps réel, en raison de son agilité et de sa conscience de soi. À cette fin, le système BBI nécessite des réactions rapides et une grande précision en termes de décodage et d'importation d'informations, ainsi qu'un retour visuel en temps réel du mouvement du rat. L'IMC basé sur SSVEP, utilisé pour le décodage d'intention cérébrale dans des travaux BBI précédents reposant sur la stimulation visuelle, pourrait empêcher le manipulateur de réagir rapidement au retour visuel en temps réel. Comme solution alternative, l'IMC basé sur l'imagerie motrice présente les avantages d'une réponse rapide et d'un faible niveau de distraction provenant du retour visuel. Par conséquent, le système BBI établi dans la présente étude intègre des instructions de contrôle décodées par une imagerie motrice non invasive avec rétroaction neurale, et les instructions sont renvoyées au cerveau du rat par ICMS en temps réel. Nous avons également proposé et comparé deux modèles de contrôle différents pour notre système BBI, le modèle de seuillage (TREM) et le modèle de gradient (GRAM), afin de fournir un processus plus naturel et plus simple au manipulateur lors du contrôle de la direction. Avec cette interface, nos manipulateurs étaient en mesure de contrôler un cyborg de rat pour effectuer en douceur les tâches de navigation dans le labyrinthe.
Bien que la faisabilité des BBI ait été préalablement prouvée, il reste difficile de créer une BBI efficace pour le contrôle multiniveau de la locomotion continue d'un mammifère dans un environnement complexe. Dans la présente étude, nous présentons une interface sans fil cerveau à cerveau, par laquelle un humain peut contrôler l'esprit de la locomotion continue d'un rat vivant. A la différence du contrôle d'appareils sans vie, il est essentiel de disposer d'une instantanéité extrêmement exigeante pour contrôler un être vivant en temps réel, en raison de son agilité et de sa conscience de soi. À cette fin, le système BBI nécessite des réactions rapides et une grande précision en termes de décodage et d'importation d'informations, ainsi qu'un retour visuel en temps réel du mouvement du rat. L'IMC basé sur SSVEP, utilisé pour le décodage d'intention cérébrale dans des travaux BBI précédents reposant sur la stimulation visuelle, pourrait empêcher le manipulateur de réagir rapidement au retour visuel en temps réel. Comme solution alternative, l'IMC basé sur l'imagerie motrice présente les avantages d'une réponse rapide et d'un faible niveau de distraction provenant du retour visuel. Par conséquent, le système BBI établi dans la présente étude intègre des instructions de contrôle décodées par une imagerie motrice non invasive avec rétroaction neurale, et les instructions sont renvoyées au cerveau du rat par ICMS en temps réel. Nous avons également proposé et comparé deux modèles de contrôle différents pour notre système BBI, le modèle de seuillage (TREM) et le modèle de gradient (GRAM), afin de fournir un processus plus naturel et plus simple au manipulateur lors du contrôle de la direction. Avec cette interface, nos manipulateurs étaient en mesure de contrôler un cyborg de rat pour effectuer en douceur les tâches de navigation dans le labyrinthe.
Résultats
Mise en place du système BBI et conception des tâches
Le système BBI de la présente étude comportait deux parties: un IMC non invasif à base d’EEG et un système cyborg de rat 17 (Fig. 1 (a) ). L’IMC basé sur l’EEG a décodé l’intention motrice du mouvement des bras droit et gauche, ce qui correspond à la génération d’instruction en tournant à gauche et à droite , respectivement. Dans la présente étude, la précision moyenne du contrôle du signal EEG des 6 manipulateurs était de 77,86 ± 12,4% pour toutes les expériences menées. Les signaux de clignement des yeux dans l'EEG ont été utilisés pour déclencher l'instruction En avant / Récompense , qui a été détectée par l'amplitude du signal EEG dans le canal frontopolaire. Les cyborgs de rat ont été préparés sur la base de travaux antérieurs 17 , 18 , 19 , 20 et ont été bien entraînés avant que des expériences soient menées dans cette étude (voir Méthodes pour plus de détails). Deux parties du système ont été connectées via une plate-forme d’intégration, envoyant des instructions décodées de l’intention motrice aux cyborgs de rat et fournissant un retour d’informations visuel en temps réel. Un aperçu du système BBI est présenté à la Fig. 1 .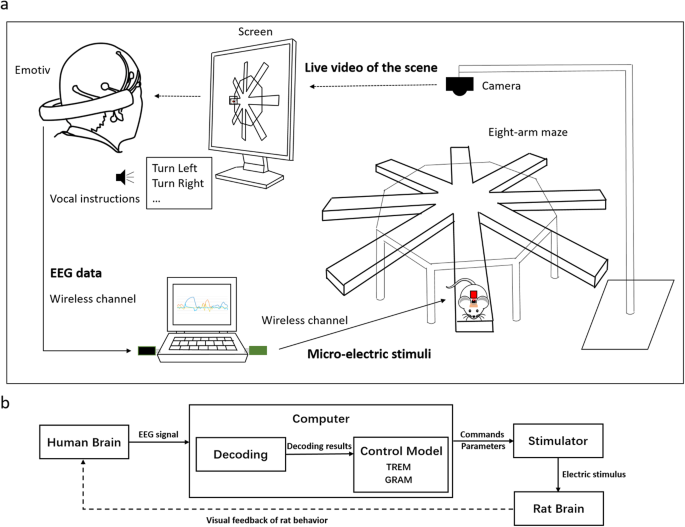
Configuration de l'expérience. ( a ) Vue d'ensemble du système BBI.
Au cours des séances de contrôle du cerveau, le signal EEG a été acquis
et envoyé à l’ordinateur hôte où l’intention motrice a été décodée.
Les résultats du décodage ont ensuite été transférés dans des
instructions de contrôle et envoyés au stimulateur à l'arrière du cyborg
de rat avec des paramètres prédéfinis. Le rat cyborg répondrait alors aux instructions et terminerait la tâche. Pour le labyrinthe à huit bras, la largeur de chaque bras était de 12 cm et la hauteur du bord de 5 cm. Le cyborg du rat était situé au bout de chaque bras au début de chaque passage. Et des directions préprogrammées ont été informées vocalement par un autre participant lors du lancement d'un nouvel essai. ( b ) Organigramme de l'interface cerveau-cerveau proposée.
L'expérience entière comportait trois étapes, une étape de contrôle manuel et deux étapes de contrôle du cerveau, chaque étape comprenant cinq séances et étant exécutée pendant cinq jours consécutifs. Chaque session était composée de 3 séries indépendantes, avec un intervalle de pause d’au moins huit minutes entre chaque série. La procédure entière a été enregistrée sur vidéo et les séquences de clics de souris pendant la phase de contrôle manuel ont été enregistrées pour une analyse plus approfondie. Aux deuxième et troisième étapes, deux modèles de contrôle différents (GRAM et TREM, voir les détails dans les méthodes) ont été appliqués. Pour tester davantage l'applicabilité du contrôle du cerveau, les cyborgs de rats ont été contrôlés pour mener à bien une tâche de navigation dans un labyrinthe plus complexe.
Contrôle manuel du cyborg de rat
Au cours de la phase de contrôle manuel, les cyborgs de rats ont été contrôlés par des opérateurs expérimentés. Nous avons constaté que la précision de virage d'un cyborg de rat bien entraîné pouvait atteindre un taux exceptionnellement élevé de près de 100%. Comme le montre la figure 2 (a) , le CPT moyen de tous les cyborgs de rat à la première session de contrôle manuel était de 190,03 ± 75,41 s et diminuait à 132,56 ± 12,39 s à la cinquième session. La plupart des rats ont montré une courbe d'apprentissage évidente au cours de la phase de contrôle manuel. Le CPT de chaque rat cyborg est devenu très proche à la fin de la phase de contrôle manuel, indiquant qu'ils se familiarisaient avec l'environnement de la tâche et les instructions de contrôle fournies dans leur cerveau. Il n'y avait pas de différence significative (test T apparié, p> 0,05) entre le CPT moyen des deux dernières sessions de la phase de contrôle manuel pour chaque cyborg de rat, ce qui indiquait que les cyborgs de rat étaient dans un état stable.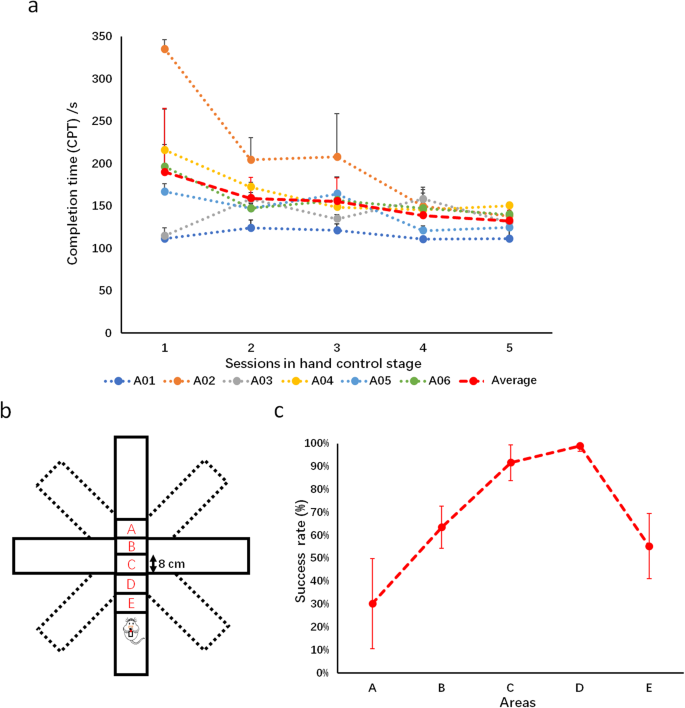
( a ) Performance de la phase de contrôle manuel. Le CPT moyen de chaque cyborg de rat pour le contrôle manuel sur toutes les sessions. (Remarque: pour l'affichage, seuls les écarts types positifs sont présentés sous forme de barres d'erreur). ( b ) Différentes zones affectées à l'enquête pour la zone optimale. Le labyrinthe plus simplifié a été modifié par rapport au labyrinthe original à huit bras en bloquant quatre bras se croisant. ( c
) Le taux de réussite moyen (moyenne ± écart type) de chaque zone pour
que les cyborgs de rat reçoivent des instructions avec contrôle manuel.
Évaluation BBI
Après l’étape 1 du contrôle manuel, deux autres étapes de contrôle du cerveau ont été effectuées par plusieurs manipulateurs de contrôle du cerveau. Au cours des deux étapes de contrôle du cerveau, les manipulateurs ont contrôlé les cyborgs de rat avec un BBI (Fig. 1 (a) ) en se basant sur l'un des deux modèles de contrôle proposés. Au cours du premier stade de contrôle du cerveau (stade 2), le modèle de gradient (GRAM) a été appliqué, et au deuxième stade de contrôle du cerveau, le modèle de seuillage (TREM) a été appliqué. Les deux modèles de contrôle étaient basés sur différentes stratégies de calcul de seuil. Les seuils ont été utilisés pour différencier les résultats de décodage attribués à l'intention réelle ou au bruit (voir Méthodes pour une explication détaillée des seuils). Les résultats des deux modèles de contrôle sont illustrés à la Fig. 3 . La valeur globale du CPT est restée stable aux deux stades de contrôle du cerveau, sans différence significative entre les deux sessions à l'intérieur de chaque stade (Fig. 3 (a) , test T apparié pour le CPT moyen, p> 0,05). Cependant, une comparaison entre les deux étapes de contrôle du cerveau a montré qu’il fallait plus de temps pour effectuer les mêmes tâches de labyrinthe avec le système BBI basé sur TREM. Le TPC moyen de tous les cyborgs de rat du stade 2 basé sur GRAM était plus court que celui du stade 3 basé sur TREM (243,41 ± 12,73 s contre 275,05 ± 14,47 s, test T apparié, p <0,05), démontrant que le modèle GRAM était meilleur que le modèle TREM pour le système BBI proposé.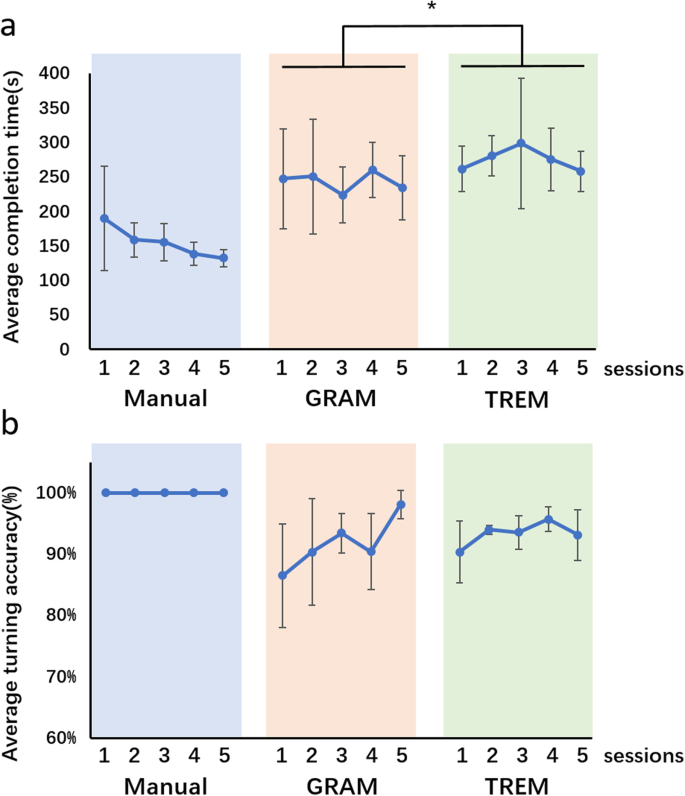
( a ) TPC moyen sur tous les cyborgs de rat pour les trois étapes consécutives. ( b ) Précision moyenne de virage sur tous les cyborgs de rat pour les trois étapes consécutives. Les barres d'erreur indiquent l'écart type. * Indique p <0,05.
Nous avons ensuite analysé le nombre d’instructions envoyées entre les trois étapes. La figure 4 (a) indique le nombre moyen d'instructions de rotation gauche et droite permettant d'effectuer une série expérimentale de toutes les sessions de tous les cyborgs de rat testés. Théoriquement, le nombre minimum d'instructions de tournage donné dans une série de 100% de précision est de 16, ce qui est difficile à atteindre même avec une commande manuelle expérimentée. Comparativement aux étapes de contrôle du cerveau basées sur GRAM et sur TREM, le nombre d'instructions de retournement au niveau du groupe était de 60,15 ± 7,33 et de 87,98 ± 56,30 (stade 2 vs. Stade 3, test T apparié, p <0,01), respectivement . Ainsi, il fallait davantage d'instructions de retournement pour diriger le cyborg de rat avec le contrôle du cerveau basé sur TREM. Le nombre d'instructions de virage étant largement influencé par la précision des instructions, les instructions supplémentaires dans TREM étaient très probablement utilisées pour compenser les effets d'un comportement de retournement erroné. Comme nous l'avons mentionné plus haut, les instructions données avec un timing approprié ont contribué à réduire le nombre d'erreurs. Par conséquent, le nombre plus faible d'instructions de retournement dans le stade de contrôle du cerveau basé sur GRAM a montré qu'il y avait moins de correction d'erreur de retournement dans le stade 2 basé sur le GRAM que dans le stade 3 basé sur le TREM.
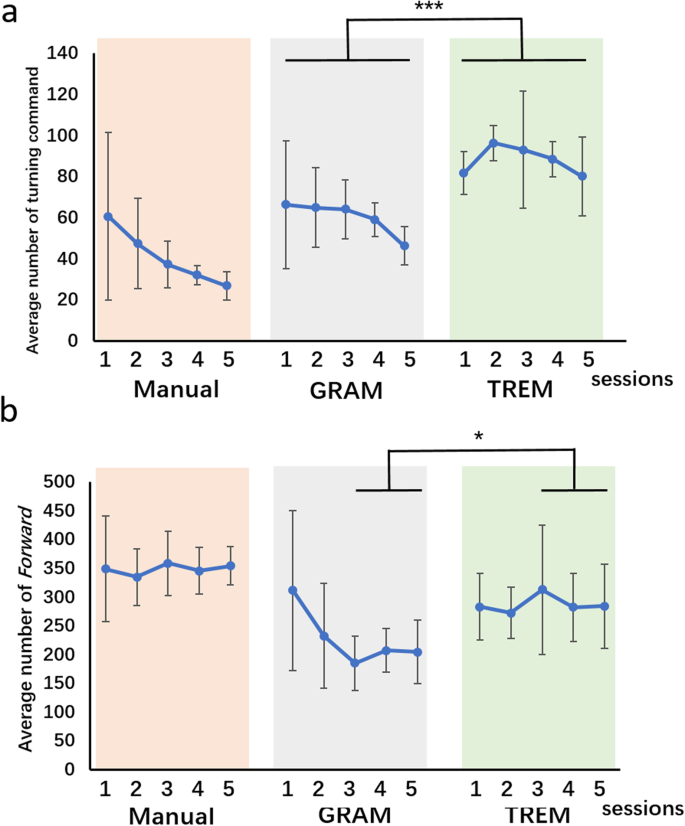
( a
) Nombre moyen d'instructions de retournement pour tous les cyborgs de
rat au cours de toutes les sessions et comparaison du nombre
d'instructions de retournement au niveau du groupe entre les différentes
étapes. ( b
) Nombre moyen d'instructions Forward pour tous les cyborgs de rat sur
toutes les sessions et comparaison du nombre d'instructions Forward au
niveau du groupe entre les différentes étapes. *** indique p <0,01, * indique p <0,05, test t apparié.
Pour expliquer les différentes performances des stratégies de contrôle du cerveau basées sur GRAM et TREM, nous avons également calculé les courts délais survenus entre le résultat du décodage produit par le dispositif EEG et les instructions générées par deux modèles de contrôle différents. Nos résultats ont montré une réduction de près de 70% du délai de génération d'instructions avec GRAM (155,01 ± 3,10 ms) par rapport à TREM (494,70 ± 47,22 ms) (voir la Fig. 5 ). Les instructions de tournage ont ainsi été générées et envoyées beaucoup plus rapidement après l’imagerie motrice avec le modèle GRAM, ce qui a permis de réduire le comportement de retournement des cyborgs de rat et d’améliorer les performances de virage.
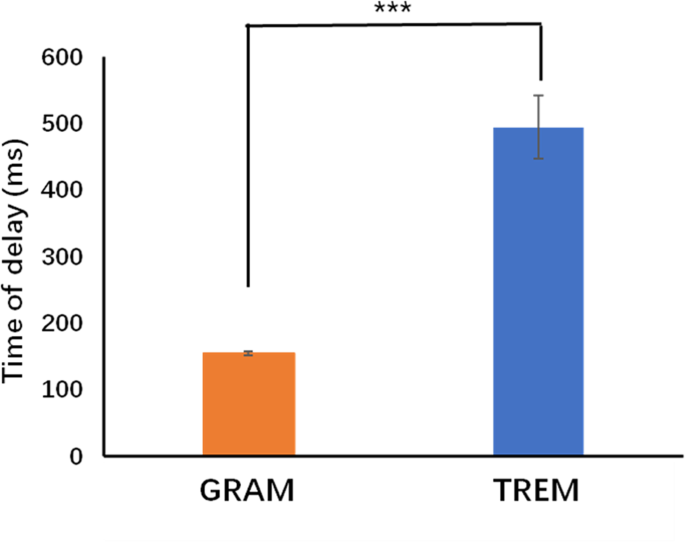
Le délai entre la sortie du résultat du décodage et la génération de l’instruction fait référence aux seuils pour GRAM et TREM. *** indique p <0,01, test t.
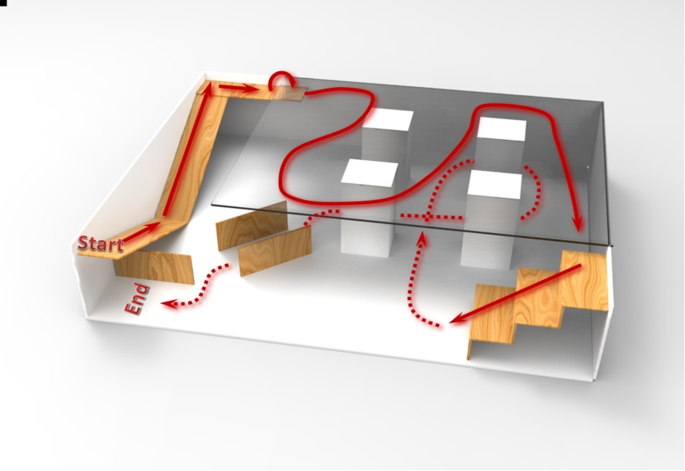
Le contrôle du cerveau humain dirigeait le cyborg chez le rat dans un
labyrinthe plus complexe (voir plus de détails dans la vidéo
supplémentaire 1 ).
Le labyrinthe en trois dimensions était plus compliqué et consistait en
un point de départ et un point final, des cuvettes et des escaliers
pour monter et descendre, une plate-forme surélevée d’une hauteur d’un
demi-mètre, des piliers à éviter et un tunnel à traverser.
On a demandé aux cyborgs de rat d’achever la tâche de navigation le
long de l’itinéraire prédéfini (flèche rouge) dans les 5 minutes.
Discussion
Notre étude a démontré la possibilité de cultiver une voie d’information entre un cerveau humain et un cerveau de rat.
Avec notre système BBI, un cyborg de rat peut effectuer avec précision
un comportement de virage et d'avance sous le contrôle d'un esprit
humain et effectuer des tâches de navigation dans un labyrinthe
compliqué.
Notre travail a étendu et exploré la possibilité supplémentaire de
transmission fonctionnelle d'informations d'un cerveau à l'autre.
Contrairement aux robots mécaniques, les cyborgs de rat ont une
conscience de soi et une motricité souple, ce qui signifie que les
cyborgs de rat auront des mouvements inattendus en fonction de leur
volonté pendant la période de contrôle.
Le système BBI doit donc être conçu avec une instantanéité élevée et
une rétroaction en temps réel pour un meilleur effet de contrôle. Les systèmes précédents de cerveau à cerveau reposaient principalement sur le paradigme SSVEP 15 , 16 . Dans le paradigme SSVEP, les manipulateurs doivent basculer leur attention entre l’écran de rétroaction et les scintillements.
Cependant, les cyborgs de rat se déplacent rapidement et nécessitent
une fréquence minimale d’instructions de transfert au dessus de 3 Hz. Il est donc difficile pour le manipulateur humain d’envoyer une fréquence élevée d’instructions Forward et de regarder simultanément la locomotion des cyborgs de rat dans l’écran de rétroaction. Par rapport aux travaux précédents 15 , 16
, nous avons utilisé l’imagerie motrice et le clignement des yeux comme
protocoles de manipulation et fourni un retour visuel en temps réel du
cyborg de rat, qui est comparativement plus viable et évite la fatigue
visuelle des manipulateurs.
En outre, lors des expériences de contrôle du cerveau des cyborgs chez
le rat, la performance globale a été influencée par plusieurs facteurs
majeurs:
- (1) La précision des instructions. La précision du décodage des images motrices et le minutage approprié des instructions de contrôle influencent le plus les performances de contrôle. De plus, l'instruction doit être envoyée avec une grande instantanéité, en particulier lorsqu'une erreur inattendue se produit. Dans nos séances de contrôle du cerveau, l’exactitude dépendait principalement de la valeur seuil et de l’actualité des instructions de déclenchement déterminées par les modèles de contrôle. Les meilleures performances (moins de CPT et de nombre d'instructions de retournement et d'avance) pour le BBI basé sur GRAM sont probablement dues à un délai réduit entre le début des résultats de décodage et la publication des instructions. Comparativement, le retard plus long survenu dans TREM peut probablement contribuer à un CPT plus long, ce qui a entraîné une plus grande quantité d'instructions nécessaires à la réalisation de la tâche. En outre, le retard plus long du modèle TREM conduit également à une obstruction des images motrices. Les manipulateurs ont indiqué que le retard de la libération des instructions pendant le contrôle du cerveau par TREM ne pouvait pas être facilement perçu. Bien que les manipulateurs aient essayé de commencer l’imagerie à l’avance, il était difficile de décider du moment précis et difficile à mettre en œuvre lorsque des instructions devaient être diffusées sur une courte période. En revanche, avec la courte durée de réponse dans GRAM, les manipulateurs ont pu démarrer l’imagerie motrice au moment optimal de réception des instructions, et la commutation entre les instructions gauche et droite était beaucoup plus facile.
- (2) Adaptation des manipulateurs à la tâche de contrôle du cerveau. L'état mental d'un manipulateur peut être influencé par des perturbations telles que le bruit ambiant et la fatigue provoquée par des images de longue durée. La capacité de les surmonter pourrait être améliorée après plusieurs séances d’entraînement. L'IMC non invasif basé sur l'EEG utilisé dans cette étude traduit les rythmes sensorimoteurs détectés dans les zones motrices bilatérales en signal de commande pour le cyborg de rat. Ce n’est pas intuitif pour les manipulateurs au début de l’expérimentation, mais le devient plus au fur et à mesure que l’expérience se poursuit. Les manipulateurs apprennent peu à peu quelle instruction doit être envoyée et quand leur imagerie doit commencer en fonction des mouvements et des emplacements du cyborg de rat, cultivant ainsi une compréhension tacite entre l'homme et le cyborg de rat. Le niveau de performance stable observé aux derniers stades 2 et 3 indique cette adaptation mutuelle.
- (3) La capacité d'adaptation inhérente des cyborgs de rat. Les cyborgs de rat possèdent une capacité d'adaptation inhérente à leur environnement et à la méthode de contrôle. La diminution globale du CPT moyen au stade du contrôle manuel indique l'adaptation des cyborgs de rat aux instructions de contrôle. La tendance de la variation de chaque ligne indique les différentes capacités d'adaptation entre les cyborgs de rat. Curieusement, le CPT final de chaque cyborg de rat a atteint un niveau similaire. Il est probable que tous les cyborgs de rat se soient adaptés au même schéma de contrôle de l'opérateur. De plus, les cyborgs de rat peuvent également s'adapter aux changements de libération d'instruction en raison de leur excellente capacité d'apprentissage. Les résultats ont montré que la performance était affectée négativement par les changements de mode de contrôle (étape 1, session 5 vs. Étape 2, sessions 1 et 2, session 5 vs étape 3, session 1 de la Fig. 3 (a, b) ) mais stabilisé par la suite. La diminution de la précision de virage du stade 1 au stade 2 était beaucoup plus nette que le passage du stade 2 au stade 3. Cela peut être dû au fait que le schéma de contrôle est plus distinct entre contrôle manuel et contrôle cérébral. Entre les différents stades de contrôle du cerveau, le schéma de contrôle du manipulateur n'était pas susceptible de changer radicalement.
- (4) En conclusion, nos résultats suggèrent que le BBI assisté par ordinateur qui transmet des informations entre deux entités est intrigant possible. Le modèle de contrôle proposé ici pourrait transférer les résultats de décodage de l'EEG-BMI basé sur l'imagerie motrice vers d'autres dispositifs externes avec une instantanéité remarquable. À l'avenir, des potentiels liés à une erreur (ErrP) 21 pourraient être utilisés pour détecter des instructions générées faussement, éliminant ainsi les instructions erronées avant de les envoyer aux cyborgs de rat. De plus, le flux d’informations deviendra bidirectionnel et communicant entre deux individus humains.
Les méthodes
Participants et déclaration d'éthique
Six rats ont été engagés dans cette étude. Toutes les méthodes ont été réalisées conformément au Guide pour le soin et l'utilisation des animaux de laboratoire du Conseil national de recherches. Tous les protocoles expérimentaux ont été approuvés par le comité d'éthique de l'Université du Zhejiang en Chine. Le consentement éclairé a été obtenu de tous les manipulateurs.Préparation cyborg rat
Le système de cyborg chez le rat avait longtemps été développé dans nos travaux de recherche précédents. Brièvement, des électrodes de stimulation bipolaires ont été fabriquées à partir de paires de fils de nichrome isolés (65 µm de diamètre), avec une séparation des extrémités verticales de 0,5 mm. Des microélectrodes ont été implantées dans le cerveau du rat pour contrôler sa locomotion. Deux paires d'électrodes ont été implantées dans le faisceau bilatéral médial de cerveau antérieur (MFB) 22 pour une stimulation virtuelle de la récompense et des instructions pour avancer. Les deux autres paires d'électrodes ont été implantées symétriquement des deux côtés des champs en baril de moustaches du cortex somatosensoriel (SIBF) 23 pour la stimulation des signaux de retournement. Les rats ont été autorisés à se remettre de l'opération une semaine avant les expériences. Une fois rétablis, les cyborgs de rat ont d’abord été entraînés à corréler les stimulations avec les comportements de locomotion correspondants 17 . Les paramètres de la stimulation électrique qui ont été envoyés dans le cerveau du rat sont basés sur nos travaux antérieurs 24 , qui peuvent activer le comportement approprié mais éviter les crises, même après une longue durée de stimulation. Au cours des séances d’entraînement et de contrôle, les stimulations électriques ont été administrées à l’aide d’un microstimulateur sans fil monté sur le dos du rat. Des instructions de contrôle ont été données par les opérateurs avec un programme informatique connecté sans fil au microstimulateur via Bluetooth.Décodage dans le BBI
Un appareil EEG commercial, Emotiv EPOC (Emotiv Inc., États-Unis) 25 a été utilisé dans cette étude pour l’enregistrement de données EEG. Les données EEG ont été acquises avec un neuro-head à 14 canaux, toutes les impédances d'électrodes étant maintenues en dessous de 10 kΩ. Au cours des expériences de contrôle du cerveau, les signaux EEG ont été échantillonnés à une fréquence de 256 Hz. Les données enregistrées étaient ensuite transmises sans fil à un ordinateur hôte via Bluetooth et étaient ensuite traitées à l'aide du SDK Emotiv. Grâce à leur imagination, les manipulateurs ont appris à moduler l’amplitude de leur rythme sensorimoteur dans la bande de fréquences mu supérieure (10–14 Hz) 26 , 27 . Le spectre de puissance des compositions gauche et droite a ensuite été obtenu sous la forme de l'intensité de l'imagerie motrice par configuration spatiale commune (CSP) 28 , c'est-à-dire, x L ( t ) et x R ( t ), respectivement. Les détails du filtre de modèle spatial commun sont décrits comme suit:Soit X R et X L le EEG prétraité lors de mouvements à droite ou à gauche de dimensions N × T , N étant le nombre de canaux et T le nombre d'échantillons par canal. Le filtre de modèle spatial commun est acquis comme suit:
- (1) Calculez la covariance de canal normalisée de X R et X L comme suit :
$$ {C} _ {L} = \ frac {{\ rm {cov}} ({{\ rm {X}}} _ {L})} {{\ rm {trace}} ({{\ rm { X}}} _ {{L}} {{\ rm {X}}} _ {L} ^ {T})} $$(1)$$ {C} _ {R} = \ frac {{\ rm {cov}} ({{\ rm {X}}} _ {R})} {{\ rm {trace}} ({{\ rm { X}}} _ {R} {{\ rm {X}}} _ {R} ^ {T})} $$(2) - (2) Calculer la moyenne des valeurs C L et C R de tous les essais EEG pour mouvements à gauche et à droite; la covariance spatiale composite est:
$$ C = \ overline {{C} _ {L}} + \ overline {{C} _ {R}} $$(3) - (3) Effectuez une décomposition en valeurs propres sur la covariance spatiale composite, où:
$$ C = {U} _ {0} {\ rm {\ Sigma}} {U} _ {0} ^ {T} $$(4) - (4) Effectuez la transformation de blanchiment sur \ (\ overline {{C} _ {L}} \) et \ (\ overline {{C} _ {R}} \) , et les matrices de covariance spatiale transformées sont les suivantes:
$$ {S} _ {L} = P \ overline {{C} _ {L}} {P} ^ {T} $$(5)où,$$ {S} _ {R} = P \ overline {{C} _ {R}} {P} ^ {T} $$(6)
$$ P = {{\ rm {\ Sigma}}} ^ {- 1/2} {U} _ {0} ^ {T} $$(7) - (5) Effectuez une décomposition en valeurs propres sur la matrice de covariance spatiale transformée, où:
$$ {S} _ {L} = {U} _ {L} {{\ Sigma}}} _ {L} {U} _ {L} ^ {T} $$(8)(Notez que Σ L + Σ R doit être une matrice d'identité);$$ {S} _ {R} = {U} _ {R} {{\ Sig {}}}} _ {R} {U} _ {R} ^ {T} $$(9) - (6) Les vecteurs propres correspondant à la plus grande valeur propre dans L et R
sont choisis pour calculer les filtres de modèle spatial communs pour
les mouvements à droite et à gauche, qui peuvent être écrits ainsi:
$$ S {F} _ {L} = {U} _ {L} (i | {{\ rm {argmax}}} _ {i} \, {{\ rm {\ Sigma}} _ {L} (i)) P $$(dix)$$ S {F} _ {R} = {U} _ {R} (j | {{\ rm {argmax}}} _ {j} \, {{\ rm {\ Sigma}} _ {R} (j)) P $$(11) - (7) Soit x ( t
) le signal EEG prétraité enregistré dans une application imaginaire du
mouvement, l’intensité des images des mouvements à gauche et à droite
peut être donnée comme suit:
$$ {x} _ {L} (t) = S {F} _ {L} x (t) $$(12)$$ {x} _ {R} (t) = S {F} _ {R} x (t) $$(13) - (8) Enfin, calculez la densité spectrale de puissance de x L ( t ) et x R ( t ) et agrégez la puissance de bande dans la longueur de fenêtre chevauchante de k.
$$ {{\ rm {B}}} _ {L} (t) = \ somme _ {tk} ^ {t} P ({x} _ {L} (t)) $$
(14)
$$ {{\ rm {B}}} _ {R} (t) = \ somme _ {tk} ^ {t} P ({x} _ {R} (t)) $$
(15)
Mise en place du système BBI
Le système BBI consistant en un BMI non invasif basé sur EEG et un système cyborg chez le rat, un programme de contrôle écrit en Visual C ++ a été appliqué pour acquérir des données brutes EEG auprès de Emotiv SDK, générer des instructions avec les modèles de contrôle et déclencher la publication des cyborg de rat. La locomotion et l'emplacement du cyborg chez le rat dans toute la scène expérimentale étaient des vidéos capturées par une caméra vue de dessus et restituées visuellement aux manipulateurs sur un écran LCD en temps réel. Les résultats de décodage de l'imaginaire moteur ont été relayés à l'aide d'un panneau de rétroaction d'instruction clignotant, intégré dans le bas de l'écran LCD par un programme auto-écrit basé sur OpenCV (Open Source Computer Vision Library, http://opencv.org ). Les résultats de décodage EEG et les instructions de contrôle moteur ont été enregistrés avec un programme basé sur J2EE (Java 2 Platform Enterprise Edition) pour une analyse plus approfondie.Modèles de contrôle pour BBI
Les entrées du modèle de contrôle comprenaient les résultats de décodage de l'imagerie moteur gauche ou droite et de la détection de clignement des yeux. Les signaux EEG recueillis ont été projetés par un filtre spatial à configuration spatiale commune (CSP). Ensuite, le spectre de puissance des compositions gauche et droite a été obtenu sous la forme de l'intensité de l'imagerie motrice, c'est-à-dire, x L ( t ) et x R ( t ), respectivement. Un clignement des yeux, x F ( t ), a été détecté lorsque l’amplitude du signal EEG \ (\ overrightarrow {(E (t))}}) des canaux proches des yeux dépasse un seuil \ (\ overrightarrow {{\ theta} _ {EOG }} \) .
$$
{x} _ {F} (t) = \ {\ begin {tableau} {ll} 1, & \ overrightarrow {E
(t)} \ ge \ overrightarrow {{\ thêta} _ {EOG}} 0, & sinon \ end
{tableau} $$
(16)
Pour la sécurité des cyborgs de rat, les instructions doivent être envoyées selon la règle suivante: Si deux instructions sont présentées de manière continue, cette dernière instruction ne sera envoyée que lorsque l'intervalle de temps est supérieur à un seuil prédéfini Δ T. Les instructions adjacentes ont été définies en tant que tuples , C1, C2 ∈ { Gauche , Droite , En avant }. Cinq types de nuplets sur neuf étaient restreints, à savoir, ΔT < F , F > , ΔT < L , L > , Δ T < R , R > , Δ T < L , F > et Δ T < R , F > Ces cinq ont été déterminés par la distribution numérique de l'intervalle pour chaque tuple en fonction de l'enregistrement de la séquence de contrôle manuel. Pour garantir la réaction adéquate, le niveau d’excitation et la sécurité des cyborgs de rat, les intervalles de ΔT < F , F > , ΔT < L , L > , ΔT < R , R > , Δ T < L , F > et Δ T < R , F > pour le contrôle du cerveau ont été fixés à 200 ms, 500 ms, 500 ms, 350 ms et 350 ms, respectivement, conformément à nos travaux précédents 17 . L'intervalle de temps minimum n'était pas limité pour FL, FR, RL et LR car le manipulateur devait envoyer la première commande de rotation aussi rapidement que possible.
Nous avons défini n = 0, 1,… la nième génération d'instruction et t L ( n ), t R ( n ) et t F ( n ) étaient les moments où une instruction se produisait. Initialement, tL ( n ), tR ( n ) et tF ( n ) étaient égaux à 0 (n = 0). La génération de Forward était la même pour les deux modèles, comme décrit ci-dessous:
$$
{Y} _ {F} (t) = \ {\ begin {tableau} {ll} 1, & t \ in \ {{{\ rm
{t}}} _ {F} | \ begin {tableau} {l} {t} _ {F} (n) - {t} _ {F} (n-1) \ ge
{\ rm {\ Delta}} {T} _ {<F, F>}, \\ {t} _ {F} (n) - {t} _ {L}
(n-1) \ ge {\ rm {\ Delta}} {T} _ {<L, F>}, \\ \ begin { tableau}
{c} {t} _ {F} (n) - {t} _ {R} (n-1) \ ge {\ rm {\ Delta}} {T} _ {<R,
F>} \ and \, {x} _ {F} ({{\ rm {t}}} _ {F}) = 1 \ end {tableau} \ end
{tableau} \} \\ 0, et sinon \ end {tableau } $$
(17)
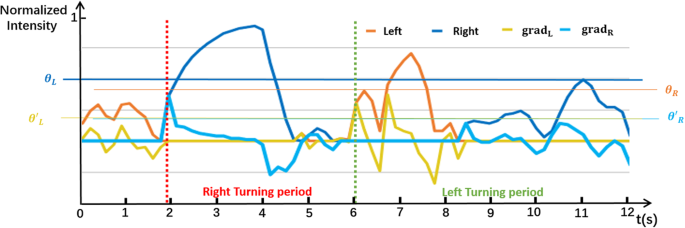
Échantillons de résultats de décodage et des gradients correspondants d’imagerie motrice dans une expérience préliminaire.
La courbe bleue est le résultat d'une imagerie de droite (droite) et la
courbe orange est le résultat d'une imagerie de gauche (gauche).
Pendant la période de virage à droite montrée sur la figure, seules des
images à droite sont apparues, tandis que dans la période de virage à
gauche, les résultats à gauche et à droite sont apparus. Les bons résultats de décodage ont été jugés dus au bruit.
De plus, les résultats de décodage à gauche apparaissant dans la
période vide (pas d'imagination) sont également considérés comme du
bruit. Les courbes de degré L (jaune) et de degré R (bleu clair) représentent respectivement les gradients gauche et droit des résultats de décodage correspondants. θ L et θ R sont les seuils optimaux pour l'imagerie motrice gauche et droite dans TREM. Pour la GRAM, les seuils optimaux sont θ L et θ R.
Modèle de contrôle de seuillage
Pour TREM, des impulsions de contrôle ont été générées lorsque l’intensité de gauche ou de droite dépassait un seuil θ . Une instruction de retournement est générée si xL (t)> 0L ou xR (t)> 0R . Par conséquent, la fonction de TREM est décrite comme suit:
$$
{Y} _ {L} (t) = \ {\ begin {tableau} {ll} 1, & t \ in \ {{t} _ {L} |
{t} _ {L} (n) - {t} _ {L} (n-1) \ ge {\ rm {\ Delta}} {T} _ {<L,
L>} \, et \, \ begin {array} {c} {x} _ {L} ({t} _ {L}) \ end
{tableau} \ ge {\ thêta} _ {L} \} \\ 0, et sinon \ end {tableau} $$
(18)
$$
{Y} _ {R} (t) = \ {\ begin {tableau} {ll} 1, & t \ in \ {{t} _ {R} |
{t} _ {R} (n) - {t} _ {R} (n-1) \ ge {\ rm {\ Delta}} {T} _ {<R,
R>} \, et \, \ begin {array} {c} {x} _ {R} ({t} _ {R}) \ end
{tableau} \ ge {\ thêta} _ {R} \} \\ 0, et sinon \ end {tableau} $$
(19)
Modèle de contrôle de gradient
Bien que le seuil dans TREM puisse différencier les résultats de décodage attribués à une intention réelle ou à un bruit de fond flottant, le délai entre le début des résultats de décodage et la génération d'instructions était trop long. Nous avons proposé un modèle amélioré, GRAM, qui surperformait à la fois la différenciation et l’instantanéité. Pour GRAM, des instructions étaient générées lorsque la valeur de gradient entre deux fenêtres de décodage transcendait un seuil θ ′. La valeur du gradient a été calculée comme suit:
$$ Grades \ début {tableau} {c} x (t) \ fin {tableau} = x (t) -x (t-1) $$
(20)
$$
{Y} _ {L} (t) = \ {\ begin {tableau} {ll} 1, & t \ in \ {{t} _ {L} |
{t} _ {L} (n) - {t} _ {L} (n-1) \ ge {\ rm {\ Delta}} {T} _ {<L,
L>} \, et \, Grad \ begin {array} {c} {x} _ {L} ({t} _ {L}) \ end
{tableau} \ ge {\ thêta ^ {\ prime}} _ {L} \} \\ 0, et sinon \ end
{tableau} $$
(21)
$$
{Y} _ {R} (t) = \ {\ begin {tableau} {ll} 1, & t \ in \ {{t} _ {R} |
{t} _ {R} (n) - {t} _ {R} (n-1) \ ge {\ rm {\ Delta}} {T} _ {<R,
R>} \, et \, Grad \ begin {array} {c} {x} _ {R} ({t} _ {R}) \ end
{tableau} \ ge {\ thêta ^ {\ prime}} _ {R} \} \\ 0, et sinon \ end
{tableau} $$
(22)
Disponibilité des données
Les jeux de données générés au cours et / ou analysés au cours de
l’étude en cours sont disponibles auprès de l’auteur correspondant sur
demande raisonnable.
Références
- 1. Royer, AS, Doud, AJ, Rose, ML & He, B. Contrôle EEG d'un hélicoptère virtuel dans un espace tridimensionnel à l'aide de stratégies de contrôle intelligentes. Ieee T Neur Sys Reh 18 , 581 (2010).
- 2 Xia, B. et al . Interface cerveau-ordinateur basée sur une stratégie de combinaison pour le contrôle de mouvement bidimensionnel. J Neural Eng 12 , 46021 (2015).
- 3 Wolpaw, JR & McFarland, DJ Contrôle d'un signal de mouvement bidimensionnel par une interface cerveau-ordinateur non invasive chez l'homme. P Natl Acad Sci Usa 101 , 17849 (2004).
- 4 Carlson, T. & Millan, JDR Fauteuils roulants à commande cérébrale: une architecture robotique. Ieee Robot Autom Mag 20 , 65 (2013).
- 5 Meng, J. et al . Contrôle non invasif basé sur l'électroencéphalogramme d'un bras robotique pour atteindre et saisir les tâches. Sci Rep-Uk 6 , 38565 (2016).
- 6 Hoy, KE & Fitzgerald, PB Stimulation cérébrale en psychiatrie et ses effets sur la cognition. Nat Rev Neurol 6 , 267 (2010).
- 7. Chen, R. et al . Dépression de l'excitabilité du cortex moteur par stimulation magnétique transcrânienne à basse fréquence. Neurology 48 , 1398 (1997).
- 8 Nguyen, J. et al . Stimulation magnétique transcrânienne répétitive combinée à un entraînement cognitif pour le traitement de la maladie d'Alzheimer. Neurophysiologie Clinique / Neurophysiologie clinique 47 , 47 (2017).
- 9 O Doherty, JE et al . Exploration tactile active utilisant une interface cerveau-machine-cerveau. Nature 479 , 228 (2011).
- dix. Flesher, SN et al . Microstimulation intracorticale du cortex somatosensoriel humain. Sci Transl Med 8 , 141r (2016).
- 11 Romo, R., Hernández, A., Zainos, A. et Salinas, E. Discrimination somatosensorielle basée sur la microstimulation corticale. Nature 392 , 387 (1998).
- 12 Min, B., Marzelli, MJ et Yoo, S. Approches basées sur la neuroimagerie dans l'interface cerveau-ordinateur. Trends Biotechnol 28 , 552 (2010).
- 13 Pais-Vieira, M., M. Lebedev, C., Kunicki, J., Wang et Nicolelis, MA. Une interface cerveau à cerveau pour le partage en temps réel d'informations sensorimotrices. Sci Rep-Uk 3 , 1319 (2013).
- 14 Rao, RP et al . Une interface cerveau-cerveau directe chez l'homme. Plos One 9 , e111332 (2014).
- 15 Yoo, S., Kim, H., E. Filandrianos, Taghados, SJ et Park, S. Interface non invasive cerveau à cerveau (BBI): établissement de liens fonctionnels entre deux cerveaux. Plos One 8 , e60410 (2013).
- 16 Li, G. & Zhang, D. Cyborg contrôlé par une interface ordinateur-cerveau: établir une voie de transfert d’informations fonctionnelle du cerveau humain au cerveau de cafards. Plos One 11 , e150667 (2016).
- 17 Feng, Z. et al . Un système de formation de contrôle à distance pour la navigation de rat dans un environnement compliqué. J Zhejiang Univ-Sc A 8 , 323 (2007).
- 18 Talwar, SK et al . Neurosciences comportementales: navigation du rat guidée par télécommande. Nature 417 , 37 (2002).
- 19 Wang, Y. et al . Cyborg de rat à repères visuels pour la navigation automatique [frontière de la recherche]. IEEE Comput Intelligent M 10 , 42 (2015).
- 20 Yu, Y. et al . Cyborgs de rats augmentant l'intelligence dans la résolution de labyrinthe. Plos One 11 , e147754 (2016).
- 21 Chavarriaga, R., Sobolewski, A. et Millán, JDR Errare machinale est: utilisation de potentiels liés à une erreur dans les interfaces cerveau-machine. Front Neurosci-Switz 8 , 208 (2014).
- 22 Hermer-Vazquez, L. et al . Apprentissage rapide et mémoire flexible dans les tâches «habituelles» chez des rats entraînés avec une récompense de stimulation cérébrale. Physiol Behav 84 , 753 (2005).
- 23 Paxinos, G. & Watson, C. Le cerveau de rat en coordonnées stéréotaxiques . (Elsevier, Academic Press, Amsterdam, 2014).
- 24 Xu, K., Zhang, J., H., Lee, JCT et Zheng, X. Une nouvelle méthode de contrôle du comportement au retournement pour robot-rat grâce à la stimulation du noyau thalamique postéro-postérieur ventral. Behav Brain Res 298 , 150 (2016).
- 25 Martinez-Leon, J., Cano-Izquierdo, J. et Ibarrola, J. Les casques d'interface cerveau-ordinateur à faible coût sont-ils prêts pour des applications en imagerie motrice? Expert Syst Appl 49 , 136 (2016).
- 26 Pfurtscheller, G., Neuper, C., Flotzinger, D. & Pregenzer, M. Discrimination fondée sur l'EEG entre l'imagination des mouvements de la main droite et de la main gauche. Electroencéphalographie et neurophysiologie clinique 103 , 642 (1997).
- 27 Wolpaw, JR, N. Birbaumer, McFarland, DJ, Pfurtscheller, G. & Vaughan, TM Interfaces cerveau-ordinateur pour la communication et le contrôle. Clin Neurophysiol 113 , 767 (2002).
- 28 Kumar, S., K. Mamun et A. Sharma, A. CSP-TSM: Optimisation des performances de la cartographie de l'espace tangent riemannien à l'aide d'un modèle spatial commun pour MI-BCI. Comput Biol Med 91 , 231 (2017).
Remerciements
Ce travail a été financé par le programme national clé de recherche et
de développement de la Chine (numéro de subvention 2017YFC1308501,
2017YFB1002503); la Fondation nationale des sciences naturelles de Chine (numéro de subvention 31627802); les projets publics de la province du Zhejiang (subvention n ° 2016C33059); Fondation chinoise des sciences naturelles du Zhejiang (LR15F020001); et les fonds de recherche fondamentale pour les universités centrales (numéro de subvention 2016XZZXX001-10).
Informations sur l'auteur
Notes de l'auteur
Les affiliations
Contributions
SZ a conçu l'étude, conçu le système BBI, réalisé l'expérience et rédigé le manuscrit. SY a conçu le système BBI, réalisé l'expérience, analysé les données et rédigé le manuscrit. LH a conçu le système BBI, réalisé l'expérience, analysé les données et rédigé le manuscrit. KX a conçu et conçu l'étude, analysé les données et rédigé le manuscrit. GP a conçu et conçu l'étude. Chaonan Yu a préparé et dressé les animaux. Tous les auteurs ont examiné le manuscrit.Auteurs correspondants
Correspondance avec Kedi Xu ou Gang Pan .Déclarations d'éthique
Intérêts concurrents
Les auteurs ne déclarent aucun conflit d'intérêts.Information additionnelle
Note de l'éditeur:
Springer Nature reste neutre en ce qui concerne les revendications
juridictionnelles dans les cartes publiées et les affiliations
institutionnelles.
Droits et permissions
Libre accès
Cet article est disponible sous une licence internationale Creative
Commons Attribution 4.0, qui permet l'utilisation, le partage,
l'adaptation, la distribution et la reproduction sur tout support ou
format, aussi longtemps que vous donnez crédit à l'auteur original et à
la source. fournissez un lien vers la licence Creative Commons et
indiquez si des modifications ont été apportées.
Les images ou autres éléments tiers de cet article sont inclus dans la
licence Creative Commons de cet article, sauf indication contraire dans
une ligne de crédit associée à cet élément.
Si le contenu n'est pas inclus dans la licence Creative Commons de
l'article et que l'utilisation prévue de votre part n'est pas autorisée
par la réglementation légale ou qu'elle dépasse l'utilisation autorisée,
vous devrez obtenir la permission directement du détenteur des droits
d'auteur. Pour voir une copie de cette licence, visitez http://creativecommons.org/licenses/by/4.0/ .
A propos de cet article

Reçu
Accepté
Publié
EST CE QUE JE
Lectures complémentaires
commentaires
En soumettant un commentaire, vous acceptez de vous conformer à nos conditions d'utilisation et aux directives de la communauté .
Si vous trouvez quelque chose d'abus ou qui n'est pas conforme à nos
termes ou directives, veuillez le signaler comme étant inapproprié.



Commentaires
Enregistrer un commentaire